log-20250911关于注意节点JOI与通用运控的想法
人类做出动作和保持平衡是两套系统,大脑通过注意力机制来调整大小脑之间对机体的控制权重。
上海H1-2客户对于遥操作时运控Policy的质疑让我产生了这样的想法——复杂任务不应该是训练一个策略,通过Fsm去切换状态,而是始终有一个通用的运控能处理平衡保持的部分。感觉现在的方向走歪了——跳舞是一个Policy,遥操作是一个Policy。那么最终机器人能做的东西就是有限的集合,谁钱多、训练的Policy多谁就赢。不过每个应用之间的隔阂很大,确实来钱快。但我拿的是死工资,我好像不太在乎别人赚多少。
我大概设想了一个这样的关节注意点模型(Joint Of Interest)。
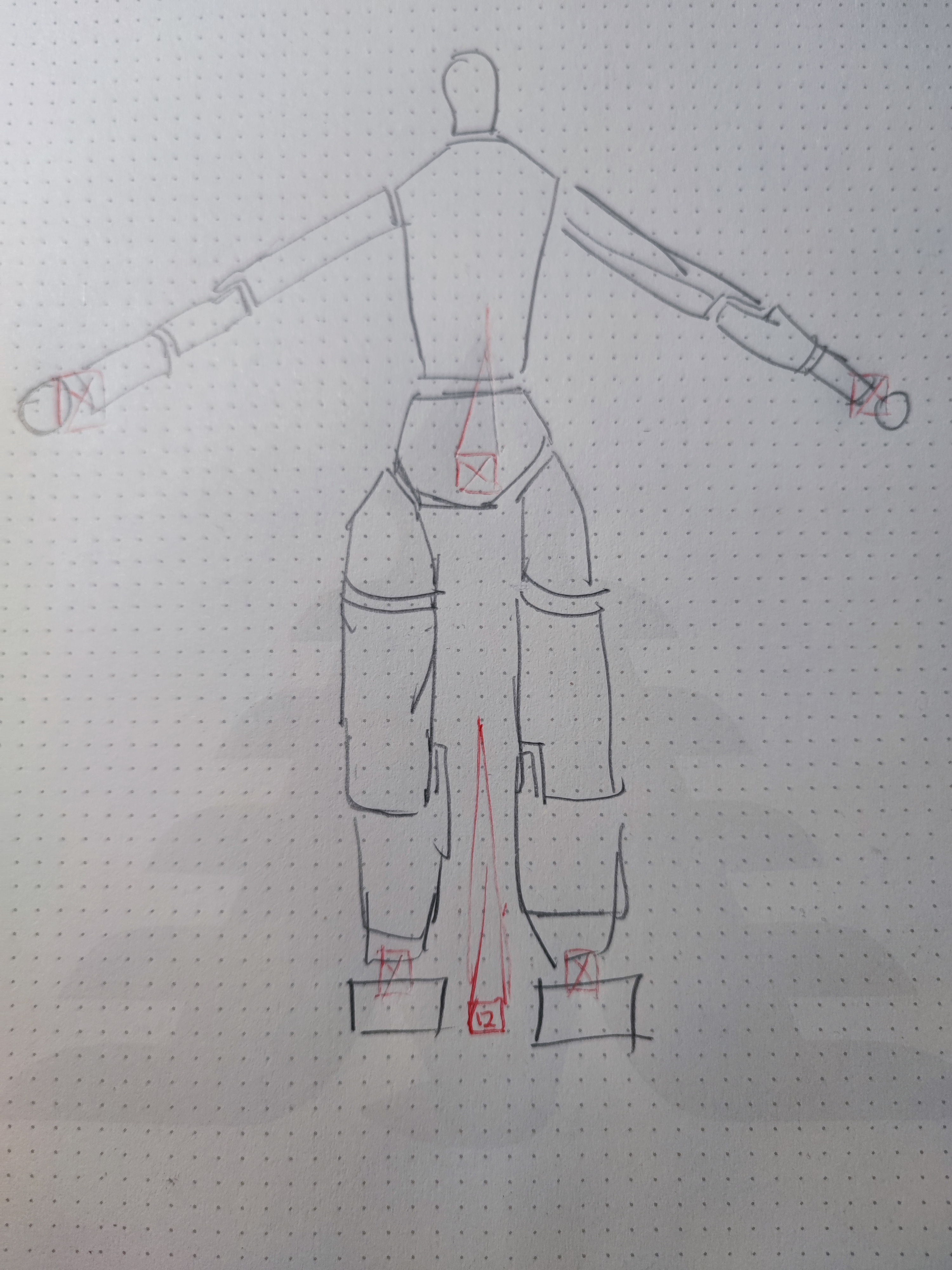
根据自由度的不同,其实还可以选择更多的JOI。这些抽象IK点能够对人体的姿态进行最大程度的抽象化。而小脑,作为Policy,需要让这些JOI在符合机体动力学的情况下的任何合理状态时能保持平衡。受控的JOI越多,越难保持平衡。这是必然的。
当然,越靠近下肢,执行器的硬权重就会相对的越高,JOI。这应当是比较合理的限制。